Cambiamos de servidor y por lo tanto un poco de imagen.
La inauguramos con la publicación de la librería MPaP_lib que he programado para el uso de motores paso a paso (Unipolares) y ya de paso contamos algo de estos maravillosos motores.
Las posibilidades de la librería las puedes ver e «Liberia MPaP_lib» y ahora contaremos algunas cosas de los Motores Paso a Paso que podrás ver ampliado en el documento PDF que se ha realizado junto a la librería.
Motores paso a paso
Un motor paso a paso es un motor que permite dar pasos precisos tenemos varios modelos ya sean por redundancia variable o los más tipicos y que son los que vamos a tratar los de iman permanente.
- Estátor: bobina generalmente circular y fija. Por lo general dos bobinados y cuatro polos.
Rotor: Es la bobina localizada en el centro del estátor, que es móvil y buscara el equilibrio según la polaridad que se aplique a las bobinas del estátor.
Hay dos tipos básicos de motores paso a paso, motores paso a paso unipolares y bipolares motores paso a paso, los primeros de 5 o 6 cables y solo necesitamos activar las bobina, y los otros que son los bipolares que tienen 4 cables ya que no cuentan con el común y su activación debe ser cambiando las polaridades entre las bobinas.
En el documento descriptivo de la librería podemos leer más sobre las característica de los motores paso a paso para saber cual elegimos como son: pasos por vuelta, máxima velocidad, angulo de paso, etc.
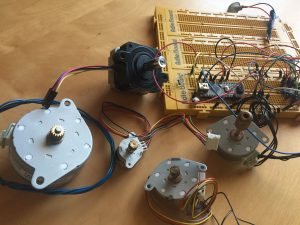
Para poder mover el motor es necesario utilizar un circuito llamado Driver Motor que permitirá que aumentar la sencilla potencia que nos da el arduino a la necesaria para poder excitar las bobinas del motor. Sistemas son muchos por transistor, puente H, etc. Nosotros planteamos el uso de un puente H L293.
Os dejo la librería y el documento descriptivo de la librería MPaP_lib donde se amplia esta información.
 Descarga de la librería MPaP_lib
Descarga de la librería MPaP_lib
 Descarga del Documento de la librería con la definición de los motores paso a paso, conexión de estos a un arduino, y uso de la librería MPaP_lib.
Descarga del Documento de la librería con la definición de los motores paso a paso, conexión de estos a un arduino, y uso de la librería MPaP_lib.
